

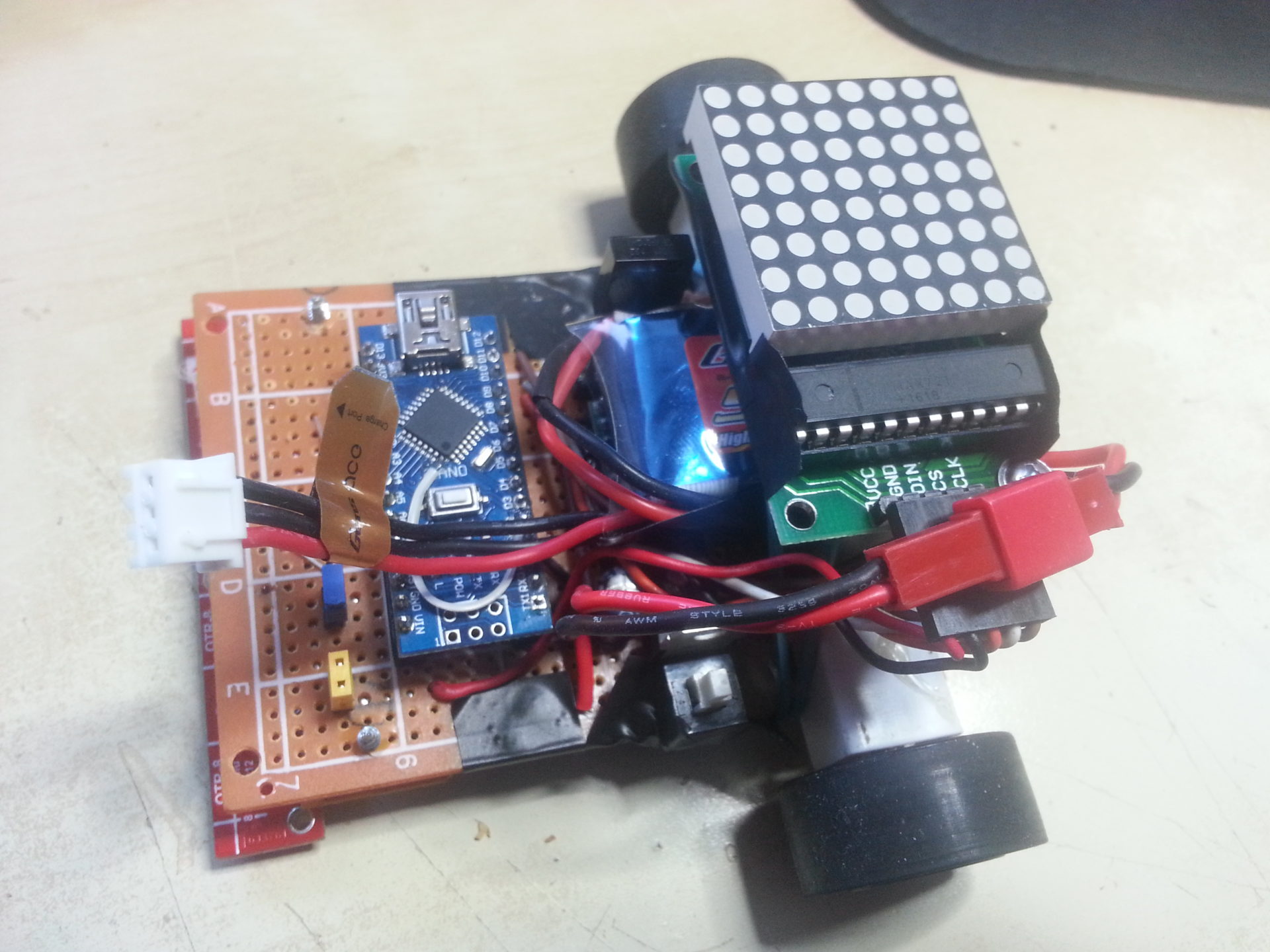
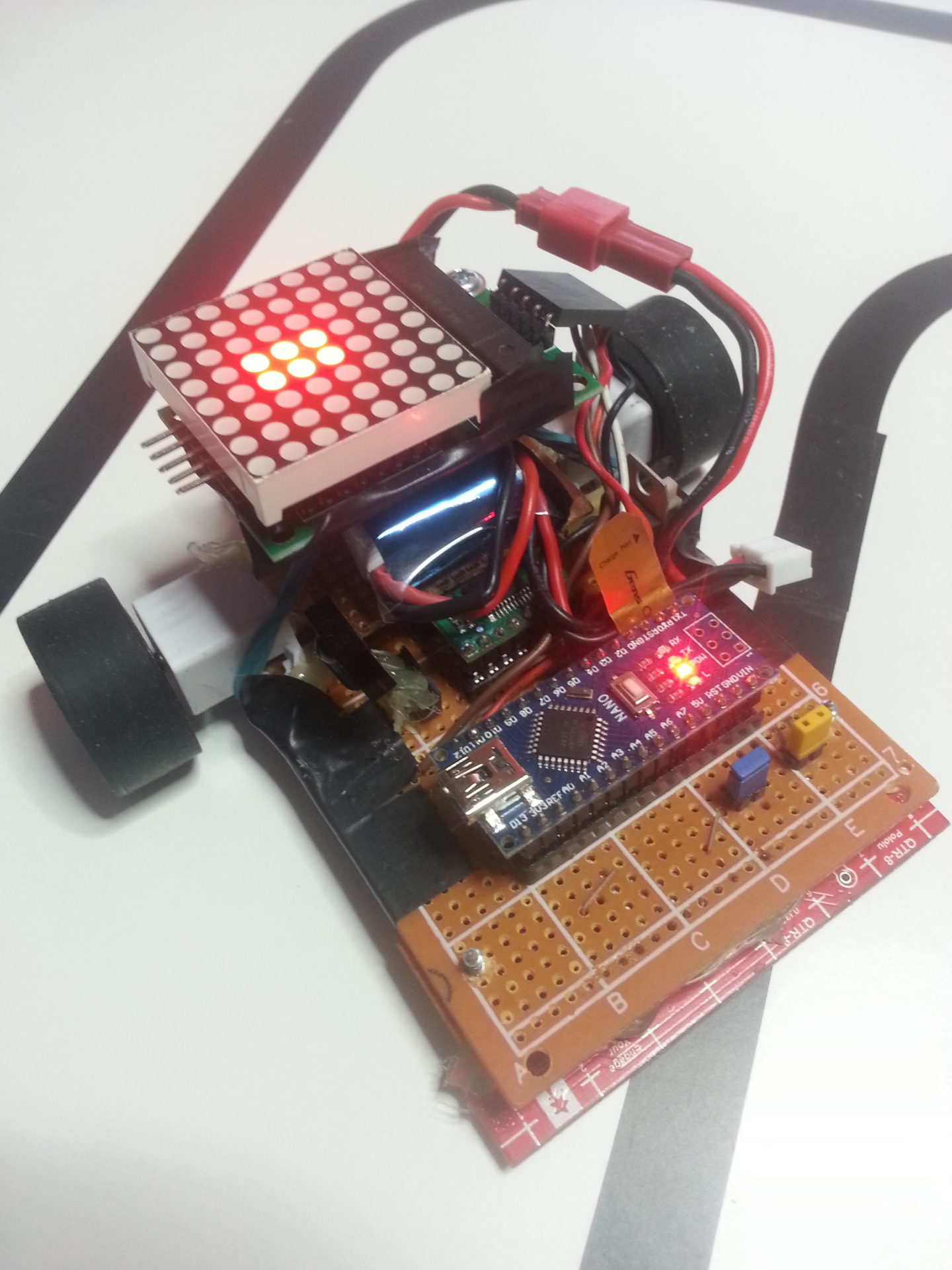
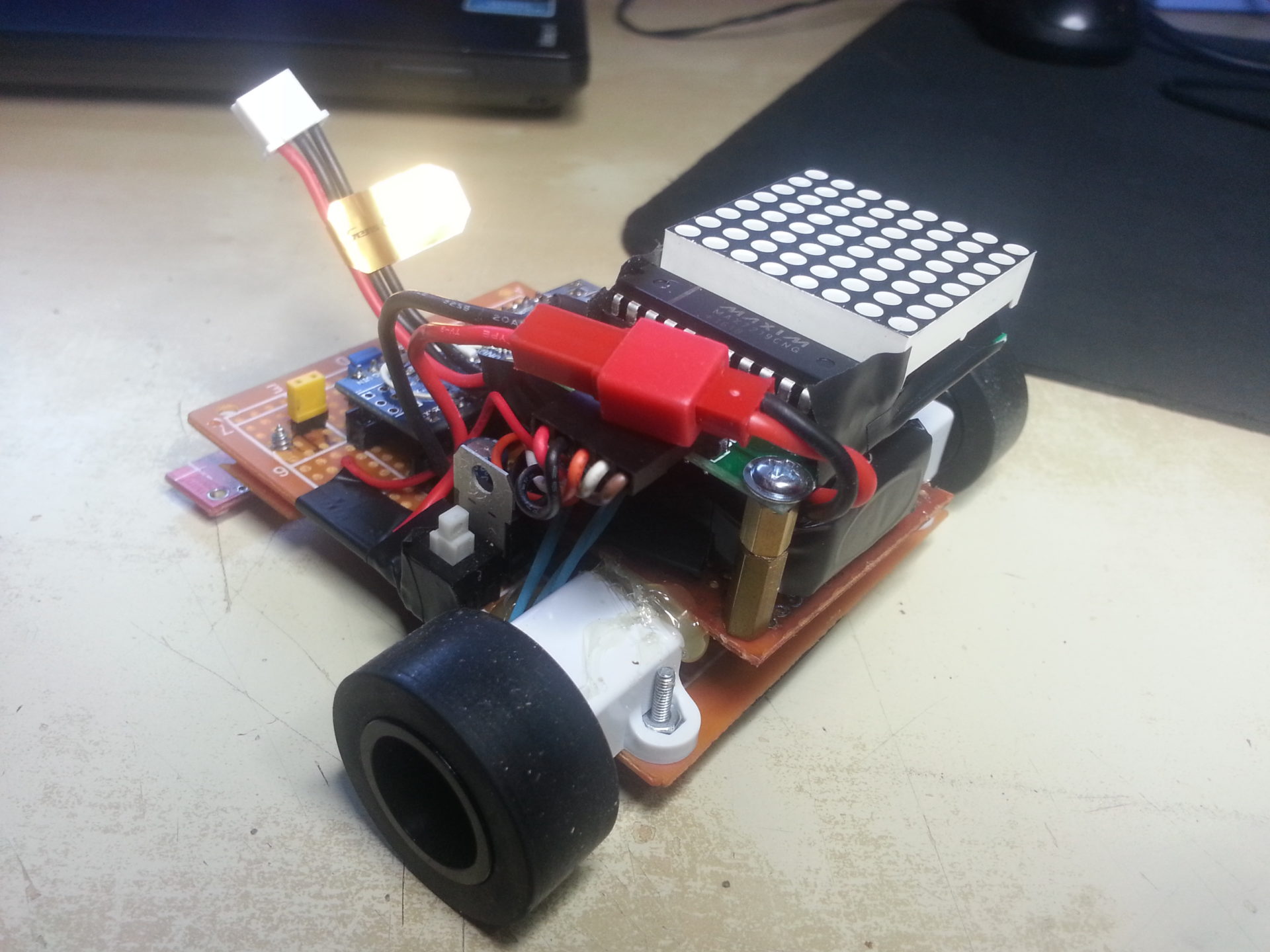
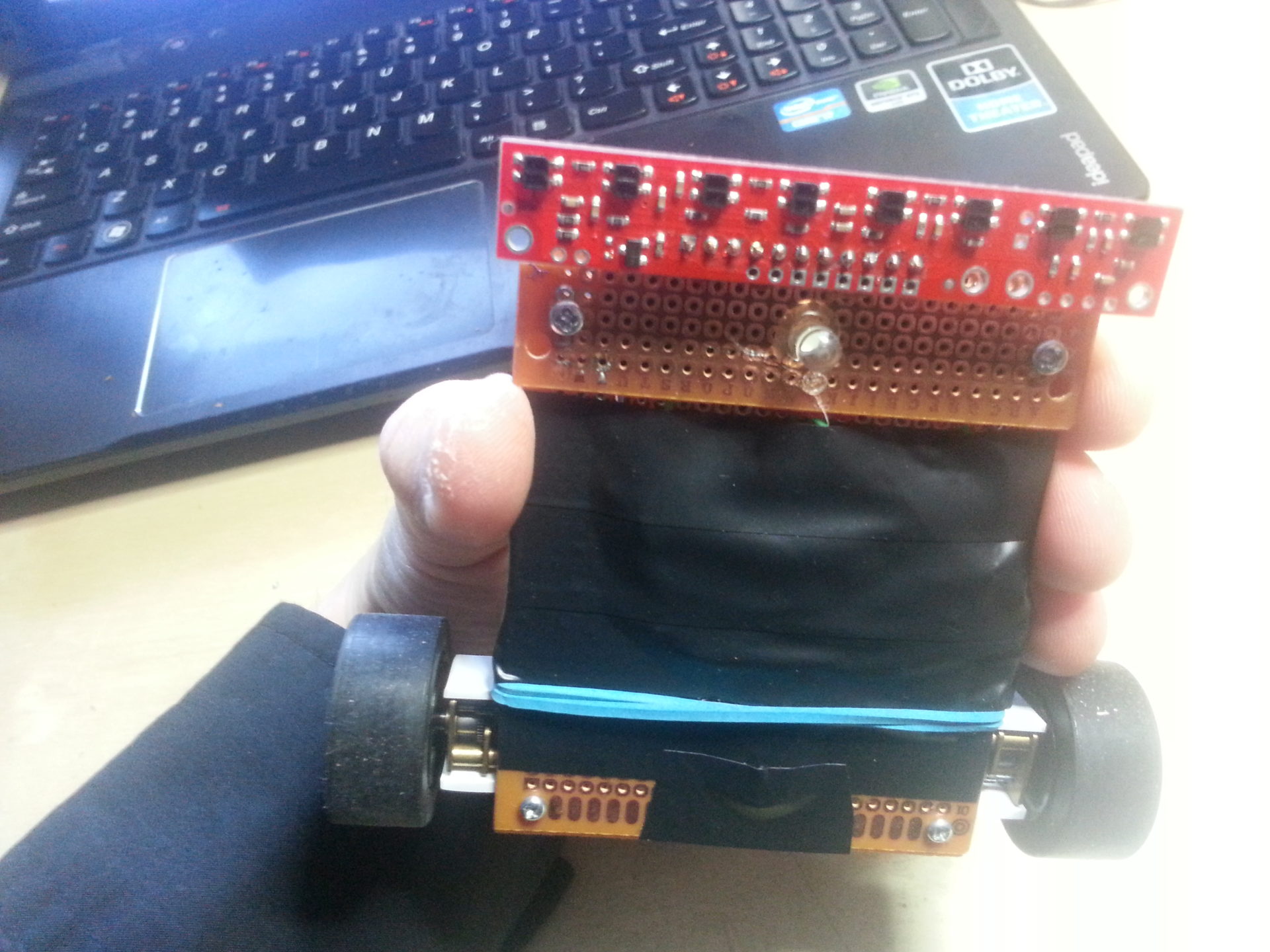
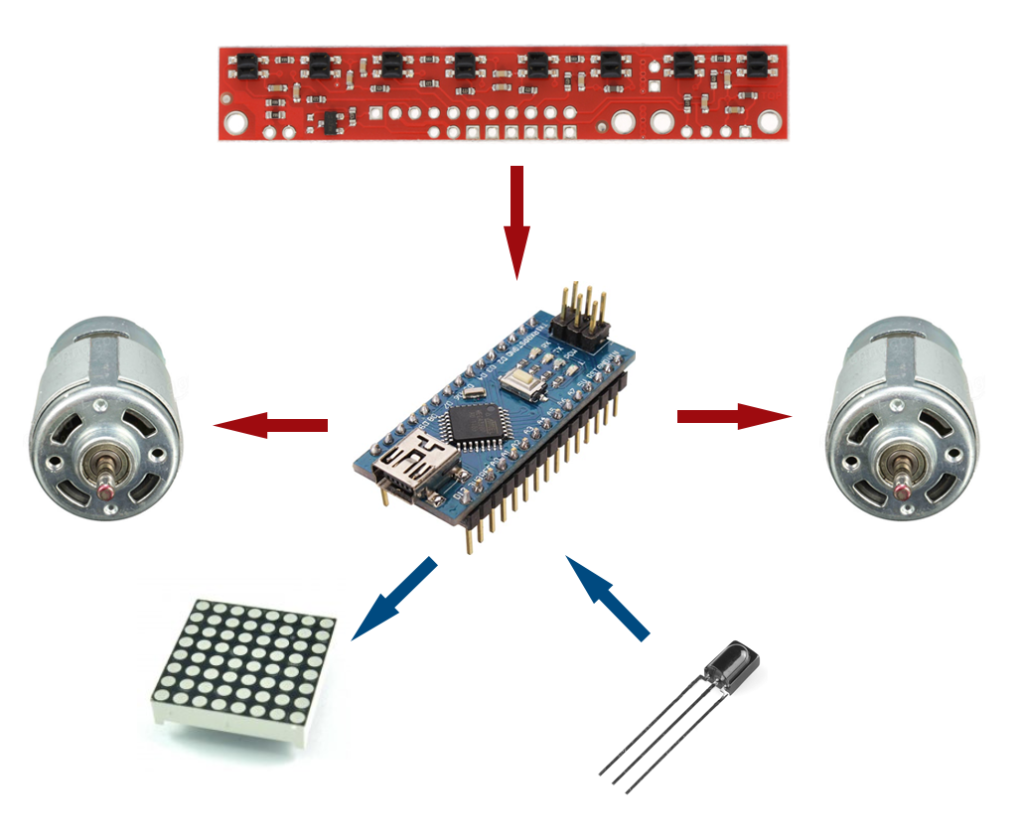
Self constructed and programmed robot tht follows a black line. Based on an arduino, utilizing a reflective sensors module, DC motors, IR sensor for remote control and an 8×8 LED matrix for user feedback.
In sections below you can find description, videos, pictures, source code:
Photos
Videos
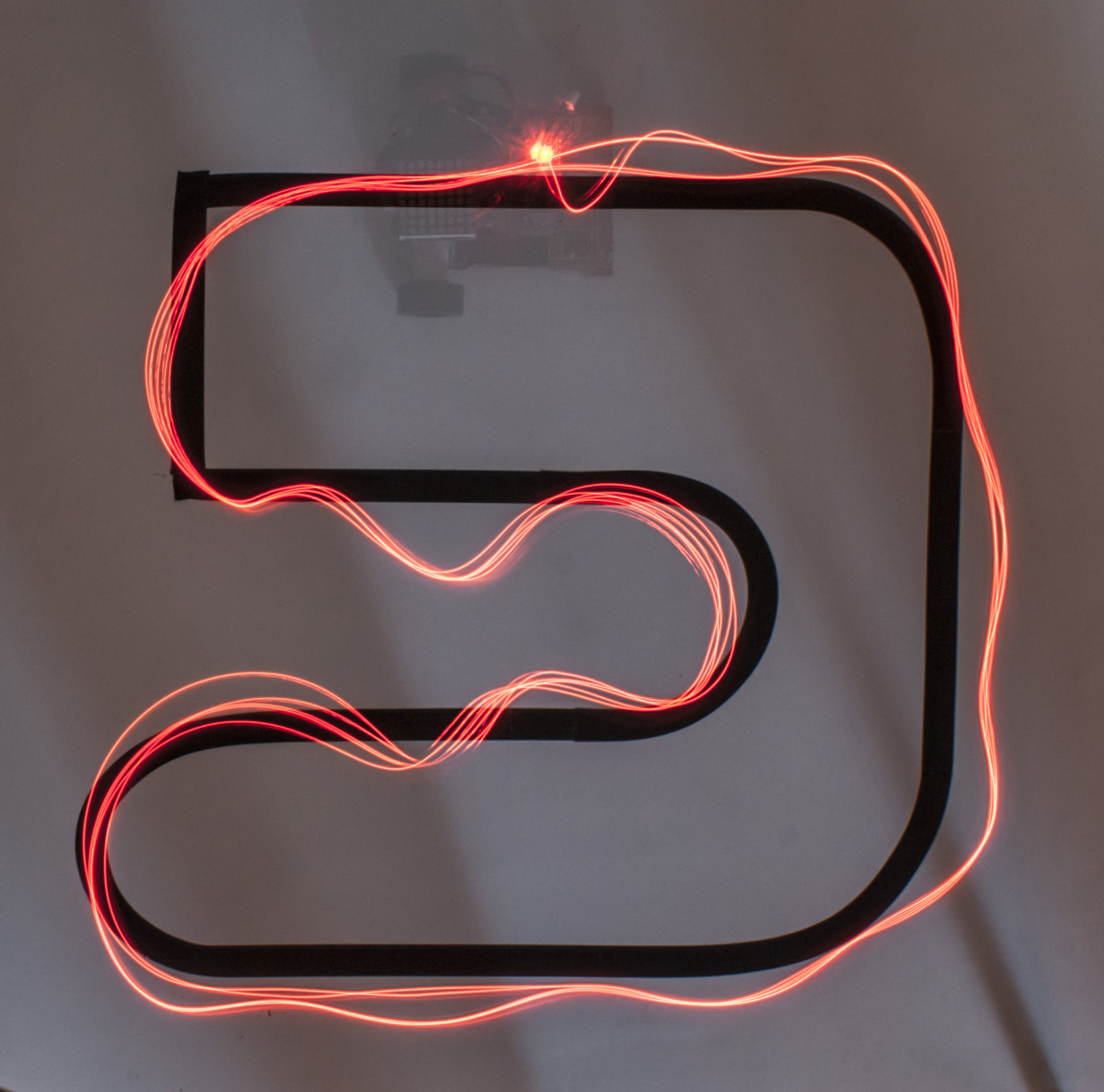
Following a single line
Line follower performance with selective tracking. The algorithm is espected to ignore ‘separated’ sensor reading and keep following the original trace.
European Robot Challenge 2017, Opole
This is a contest run during ERC 2017.
Description
Source code
In the archive below you can find a source code for arduino: